

Hybrid Aerial and Aquatic Locomotion in an at-scale Robotic Insect
![]()
Article Menu
/ajax/scifeed/subscribe
Open Access Review
A Survey on Mechanical Solutions for Hybrid Mobile Robots
1
Faculty of Engineering, University of Nottingham, Nottingham NG8 1BB, UK
2
LARM2: Laboratory of Robot Mechatronics, University of Rome "Tor Vergata", 00133 Rome, Italy
*
Author to whom correspondence should be addressed.
Received: 6 March 2020 / Revised: 24 April 2020 / Accepted: 4 May 2020 / Published: 8 May 2020
Abstract
This paper presents a survey on mobile robots as systems that can move in different environments with walking, flying and swimming up to solutions that combine those capabilities. The peculiarities of these mobile robots are analyzed with significant examples as references and a specific case study is presented as from the direct experiences of the authors for the robotic platform HeritageBot, in applications within the frame of Cultural Heritage. The hybrid design of mobile robots is explained as integration of different technologies to achieve robotic systems with full mobility.
1. Introduction
Mobile robotics is one of the main research topics in robotics, addressing robot design, navigation, perception, mapping, localization, motion planning, and control. A mobile robot is defined by its capacity of moving from one location to another arbitrarily distant one, by using one or more modes of locomotion. These locomotory structures include an extremely wide range of mechanical, chemical, mechatronic, electro-magnetic, pneumatic and hydraulic architectures, whose goal is to move the robot through a pre-defined environment. The earliest mobile robots were developed in the late 1960s [1,2], when the wheeled robot Shakey was developed as a testbed for DARPA-funded AI research at Stanford Research Institute [3,4]. At the beginning, mobile robots were only seen as tools to demonstrate AI and navigation systems. However, many research groups quickly grew more and more interested in studying locomotion itself, designing and inventing robots with various modes of locomotion. In the 1970s, the spotlight was on legged robots. The first legged system was the Phony Pony [5], which was developed in 1968 as a two-degrees-of-freedom (DoF) quadruped robot able to walk in a straight line only. In the same year, the General Electric Quadruped was invented and built [6]. Biped robots appeared some years later, when, in 1970, Kato started the WABOT project at Waseda University, Tokyo [7]. In the meanwhile, the Vietnam War and the First Persian Gulf War pushed military research groups to focus on Unmanned Aerial Vehicles (UAV) [8]. Several Autonomous Underwater Vehicles (AUV) were developed in the 1980s and 1990s, as reported in [9,10]. In the last decades, more and more modes of locomotion were considered for robots, and each of them was developed independently from the others. The designs of two different mobile robots often have nothing in common, and motion parameters and requirements may vary from task to task. Because of these issues, it is difficult to find a general classification of mobile robots and autonomous systems, and very few researchers have approached mobile robots with a wide perspective. Furthermore, some tasks could be performed only by combining two or more modes of locomotion, or they could require moving through different environments. In these cases, a mobile robot should be able to reconfigure itself for the new scenario in order to achieve its goals. This kind of robots is the focus of this article, which addresses the requirements and issues that are necessary to design systems with two or more modes of locomotion. In order to do so, a classification of modes of locomotion is proposed with both natural and artificial examples. The state-of-the-art of mobile robots is presented, with a detailed analysis of the literature on robots with multiple locomotory systems. The interaction and cooperation of different locomotory systems is discussed, and the main trends, research patterns, and research gaps in hybrid mobile robots are identified.
2. Classification of Locomotion
Most of the mobile robots only share biomimetics (i.e., being inspired by the physiology and methods of animal locomotion). The parallelism between robot and animal locomotion can be used to borrow classifications of animal locomotion to categorize mobile robots. Literature on animal locomotion is larger and richer since it has fascinated mankind for millennia. A first example can be found in De Motu et De Incessu Animalium, a study on animal modes of locomotion that was written by Aristotle in the 4th century BC [11]. Modern books on animal locomotion [12,13,14] often approach modes of locomotion from a biomechanics and bioengineering point of view, while also offering further insight on the physics behind some uncommon modes of locomotion, which have often inspired researchers to build unusual mobile robots. By following a biomimetic approach, it is possible to classify the modes of locomotion into three major areas according to the environment they move in, namely aquatic, terrestrial, and aerial [12,13,14]. For each area, several types of locomotion can be identified [1]. Each type of locomotion is characterized by an underlying physical principle and can be achieved by one or more different modes of locomotion. A general classification is presented in Table 1. This classification is selective and not intended to cover the entire subject field.
2.1. Aquatic Locomotion
As shown in Table 1, the main type of locomotion in aquatic environments requires swimming, which can be defined as a propelled motion through water (or similar liquid media). Usually, fish move through water by combining an undulatory motion of their body and fin oscillation to obtain a forward thrust, [12]. A similar principle is used by bacteria and less complex organisms that generate thrust through a flagellum. However, the complex fluid-dynamic analysis required by these modes of locomotion makes them difficult to use and control in AUV. For these reasons, helices and jet propellers are usually identified as the main mean of motion for underwater robots. Several literature reviews can be found on the topic, such as in [15,16,17]. The first remotely operated underwater vehicle, POODLE, was built in 1953 [1], and AUVs evolved in the following decades from ship and submarine designs. However, in the 2000s, a surge of interest in biomimetics and soft robotics led to the development of swimming robots with fins, undulatory motion, and flagella as main modes of locomotion [18,19,20,21,22,23,24,25], despite the challenges posed by these kinds of design. Benthic motion is performed by those animals (and robots) that move on the bottom of aquatic environments (e.g., crabs, scallops). Very few benthic robots can be found in the literature, with some examples in [26,27,28]. Surface motion, on the other hand, has many applications and has been widely researched in naval engineering, [1,15,16,17]. Robot design for surface motion usually implies remote/autonomous control of existing marine vessels. However, some unusual design for surface motion can be found, as inspired to water strider insects, such as Robostrider [29,30].
2.2. Aerial Locomotion
The main type of locomotion in aerial environments is active flight, that can be achieved by an aerodynamic lift generated by a propulsive thrust. Insects, birds and bats can fly by flapping wings, even if they are characterized by different mechanical structures due to three different evolutionary paths. Several bio-inspired robots from the last decade mimic their flight strategies, [31,32,33,34,35,36,37,38,39,40,41,42,43,44], but the technology is still not mature for large-scale production. On the other hand, non-flapping passive wings can be used to generate aerodynamic lift by using a jet engine, a propeller or a rocket engine, such as in airplanes. The most successful robots that move by active flight, however, are Unmanned Aerial Vehicles (UAV) with helices, commonly known as drones. The usage of these systems in many different fields, [45,46,47,48,49], has been growing and growing, and they will likely have a huge impact on everyday life in the next decade, [50,51,52,53]. Among the other types of locomotion in aerial environments, ballooning has been rarely used [54].
2.3. Terrestrial Locomotion
Terrestrial locomotion in animals is mostly achieved by means of legs, thanks to their capability to allow for navigation through rough terrain, obstacles and narrow spaces. Research in walking robots has spanned through the last fifty years [1,55]. The first legged robots appeared in the late 1960s as quadrupeds, whereas biped robots appeared some years later, when, in 1970, Kato started the WABOT project at Waseda University, Tokyo [1,7,56]. They were all characterized by static gaits. Dynamically stable gaits were first approached in the 1980s by Raibert [57], who started with a planar hopping system and elaborated it to a bipedal and quadruped machine. Since the early 1990s, legged robotics moved to the design of more versatile systems able to perform several different operations. This development became possible thanks to the increased available computational power, which allowed for dynamic control of complex systems. Among the successful projects, Honda's "E" and "P" bipedal platform was probably the most famous, and it culminated in the development of the ASIMO robot [58]. Another well-known platform was Boston Dynamics' BigDog, a dynamic quadruped robot that was developed for DARPA in 2006 [59]. BigDog could trot through unstructured terrain and steep slopes and recover from slipping on ice. In the 2010s, Boston Dynamics also released the humanoid Atlas and the smaller quadruped Spot, both capable of performing complex dynamic tasks (e.g., backflips) [59]. Another humanoid, NAO by Aldebaran Robotics (now SoftBank Robotics), launched in 2008, is now the standard platform for several robotics competitions, such as the RoboCup Standard Platform League [60]. Other example of humanoids are: iCub, for research on cognitive development [61]; WALK-MAN, a rescue robot [62]; Ami, for domotics [63]; REEM-B by PAL-Robotics, for service tasks [64]; LARMbot, for service tasks [65]; ARMAR, for domotics [66,67]. However, some issues still prevent legged machines from being available for large-scale use. The main issue is power source options, since the available ones limit legged robots to very short battery operations, making them suitable only for demonstration. Internal combustion engines are used in some robots, such as BigDog, but they restrict their usage to places where noise and emissions are not a problem. Furthermore, small systems are limited by the performance of the current actuator technology. Biped and quadruped robots are usually extremely expensive, and the task that they can perform can be achieved successfully by simpler and cheaper systems.
Two distinct modes of terrestrial locomotion that use rotation can be found: rolling, when the organism rotates as a whole; and wheels or tracks, where the rotation is limited to an axle or a shaft and to part of the body only. In nature, a few animals are able to roll, while no instances of wheels can be found. On the other hand, wheeled and tracked robot are widespread and represent the most mature mobile robot technology, [1,68,69,70,71,72,73,74], thanks to their simple control and high performance, despite their limitations with obstacles and rough terrains. Rolling robots have been investigated and many successful prototypes have been proposed, [75,76,77,78,79,80].
Snake-like and worm-like robots have been investigated since 1972, when the first "Active Cord Mechanism" (ACM) was developed by Hirose at Tokyo Institute of Technology [81]. Hirose and his team led research on snake-like locomotion for decades, [82,83,84,85]. In the late 1980s, a kinematic model for snake-like robots was presented [86,87,88], laying the foundation for continuum robot control. A rich literature in snake robots can be found from 1995 to the present, ranging from kinematics [89,90,91,92,93] to gait generation and path planning [94,95]. Small-scale snake robots are focused on medical applications, as in [96,97,98,99], while larger systems are used for inspection, surveillance and rescue [100,101,102]. Some innovative designs have emerged in the last decades, such as continuum robots with origami [103,104] and kirigami [105] structures, and soft continuum robots [106].
2.4. Hybrid Locomotion
Hybrid mobile robots are characterized by two or more modes of locomotion. This kind of robots, sometimes called multimodal, can be divided into:
-
Reconfigurable multimodal robots, when they are characterized by two or more locomotion modes performed by the same mechatronic system. The reconfiguration strategy of these class of robots must be carefully studied to reduce "dead" times, when the robot changes from a configuration to another.
-
Non-reconfigurable multimodal robots, when the different locomotion modes are independent from each other. In this case, it is possible to define hybrid motion strategies when both modes are performed together to optimize navigation and performance.
Moreover, the different modes of locomotion could be part of the same area or could allow the robot to navigate through two or more different environments, as outlined in Figure 1.
2.5. Technology Readiness
As mentioned in the introduction, the different modes of locomotion are characterized by a wide range of designs. Some of them have been in use for decades and can be easily controlled even by non-expert users. Others have experienced little success, but their functioning is well understood and documented. In order to estimate the technology level of each mode of locomotion, two different indicators are used in this work. The first one is the Technology Readiness Level (TRL) [107], which is an assessment of the maturity of a particular technology on the following scale:
-
TRL 1 – basic principles observed
-
TRL 2 – technology concept formulated
-
TRL 3 – experimental proof of concept
-
TRL 4 – technology validated in laboratory
-
TRL 5 – technology validated in relevant environment
-
TRL 6 – technology demonstrated in relevant environment
-
TRL 7 – system prototype demonstration in operational environment
-
TRL 8 – system complete and qualified
-
TRL 9 – actual system proven in operational environment.
The second one is the Commercial Readiness Index (CRI) [107], which aims to complement the TRLs by assessing the commercial maturity of technologies across the following levels:
-
Level 1 – Hypothetical commercial proposition
-
Level 2 – Commercial trial
-
Level 3 – Commercial scale up
-
Level 4 – Multiple commercial applications
-
Level 5 – Market competition driving widespread deployment
-
Level 6 – "Bankable" grade asset class.
An estimation of both TRLs and CRIs of locomotion modes according to the literature presented in this section can be found in Table 1. Only three locomotion modes, namely drones and wheeled/tracked vehicles, are mature enough for commercial applications (CRI 4–6), mainly due to their design being an adaptation of existing vehicles to autonomous or teleoperated navigation. None of them has seen widespread deployment, mainly due to high costs, even if some specific applications are technologically mature (e.g., robotic vacuum cleaners). Several companies are working to develop fully autonomous cars (e.g., Google, Apple), but a combination of high complexity, costs, and legal issue are still relegating them to few prototypes. Most of the bio-inspired designs, on the other hand, are characterized by a very low TRL, with widespread research on them but no commercial application and very few functional prototypes. However, the surge of interest in soft and biomimetic robots could result in a spike in their TRL in the next decade.
3. Terrestrial Hybrid Robots
The wide range of different terrestrial environments, with a huge variety of terrain and conditions, often requires more than a single locomotion mode to achieve a task. Even a simple linear straight motion can be deeply affected by a change of terrain, such as moving from concrete to sand. For these reason, many multimodal land robots were designed. Among them, the most common type is characterized by having both wheel and legs, as per examples in Figure 2 and Figure 3.
Wheels are the most efficient locomotion mode, but they have issues when navigating in rough terrain and they cannot overcome obstacles higher than their radius. Legged locomotion allows robots to move in unstructured terrain, with uneven surfaces, steps and obstacles. Furthermore, wheels and tracks erode the terrain they move in, while walking robots reduce this damage considerably. Both locomotion modes are easy to control when more than three legs and wheels are used, as they ensure static balance. For these reasons, many hybrid robots with legs and wheels have been developed, [108,109,110,111,112,113,114,115,116,117]. Most of them are characterized by independent locomotory systems, such as the examples in Figure 2, with the wheels that can also act as foot for the legged locomotion mode. However, dependent leg-wheel locomotion can be found in robots with wheels that transform into legs to change mode, as shown by the prototypes in Figure 3.
Even though wheeled-legged robots are the majority of terrestrial hybrid robots, some other locomotory mode combinations can be found. MorpHex, in Figure 4a [118], is a reconfigurable hybrid robot that can move either by rolling or as a hexapod. A reconfigurable snake/biped robot is shown in Figure 4b [119], while the robot in [120] combines omni-directional wheels and slithering.
Overall, the main trend in terrestrial hybrid robot can be identified in having a main motion mode with high efficiency and performance (usually rotational) and a secondary one that is used to overcome the obstacles and terrains where the main mode struggles. Thus, the mechanical architecture of most of these robots can be summarized as one of the following two designs:
-
Serial leg structure with a wheel as part of the foot, such as the examples in Figure 2.
-
Wheel made of an articulated structure that can reconfigure as a serial leg, as shown in the examples in Figure 3.
Terrestrial hybrid robots are usually characterized by static balance and the main research challenge is the motion strategy optimization.
4. Amphibious Hybrid Robots
Amphibious robots can navigate through terrestrial and aquatic environments, and they can be divided into two different subclasses: the first one includes all those robots that use the same locomotion mode to move both through aquatic and terrestrial terrains, such as the examples in Figure 5 [121,122,123,124,125]; the second one includes those robots that use distinct locomotion modes for land and water, such as in Figure 6 [126,127,128]. Many terrestrial hybrid robots were characterized by main and secondary locomotion modes, whereas amphibious robot research aims to have a single locomotion mode (namely legs, wheels or a combination of the two) that can be adapted to underwater motion by including a thrust-generating element. Surprisingly a few amphibious robots evolved from amphibious vehicles such as ATVs and hovercrafts, especially when considering how the most successful and technologically advanced mobile robots with a single locomotion mode were created by embedding autonomous drive into pre-existing vehicle designs.
Overall, the most successful mechanical solution for amphibious hybrid robots is a reconfigurable fin that doubles up as a leg for terrestrial locomotion, such as the one in Figure 5a. Most of these robots employ hexapod walking patterns with static balance given by three legs in contact with the ground at any time, while all six fins are used contemporaneously during aquatic motion. Given the variety of designs, however, it is possible to identify several application-based research challenges, but no single one is shared by all the amphibious robots.
5. Aerial Hybrid Robots
Every flying animal—birds, insects, bats—can perform a kind of legged locomotion (hexapod locomotion for insects, biped for birds, quadruped for bats). However, most of their robotic counterparts are designed to aerial motion only, since the requirements for flight are extremely restrictive and adding a terrestrial locomotion system means increasing complexity and weight. Very few research groups have approached this research topic. Among them, Floreano's group developed a bat-inspired robot that is able to fly and crawl thanks to a reconfigurable folding wing design, [129,130]. A few other examples combine drone architectures with legs and wheels, Figure 7, [131,132,133].
Research on hybrid robots that can move through aerial and aquatic environments has been extremely scattered and sparse, with some studies up to the conceptual design stage [134,135,136] but no prototypes yet. The advantages of these robots are outweighed by their rather complex design, having to consider locomotory systems able to generate aerodynamic and fluid-dynamic thrust and lift forces, as well as function and weather extreme environments (underwater currents, wind). Furthermore, their application is limited to few, very specific tasks that can usually be achieved by separate systems. For these reasons, this kind of hybrid robots will difficulty be developed without further advances in pure aerial or aquatic autonomous systems. Overall, this field of research is almost unrepresented, while offering several design advantages when compared to purely flying or land robots, as highlighted by the HeritageBot case study.
The main mechanical challenge in aerial hybrid robots is the weight of the structure. Adding a mechatronic system for land locomotion to a flying robot significantly increases its weight, limiting the available solutions to miniaturized robots (Figure 7) or flying solutions that are oversized when compared to the land locomotion system. Furthermore, a main research gap can be identified in the interaction between the terrestrial and aerial locomotion systems, as further detailed in the HeritageBot case study.
Case Study: HeritageBot
In this section, a case study of a hybrid walking-flying robot, HeritageBot, is presented. HeritageBot, shown in Figure 8, was developed as part of the HeritageBot project at University of Cassino, with the aim of enhancing the exploration and conservation of Cultural Heritage. The main challenge of this project was to address the survey, inspection, and investigation of archaeological areas that cannot be accessed by human operators, either for safety reasons, inaccessible and/or hazardous environments or to prevent or mitigate the risk of damaging or deteriorating features such as mosaics and floor frescos. The best solution to achieve the task was identified in a flying/walking robot, as documented in [137]. The technical requirements for the platform were defined as the capability of acquire data through tele-operated and autonomous action, aerial and terrestrial mobility, capability of small-scale intervention and collection of samples, and a modular design to embed a variety of sensors according to the kind of necessary intervention.
The advantages of flying and walking robots is analyzed in detail in [138], where the authors describe the development of two complementary robots, a walking platform and a drone. The drone is able to fly over the target area in order to map the environment and localize the main points that need further investigation or intervention. The aerial data is shared with the walking robot, which then walks to the point and performs the tasks, thanks to its better land mobility, battery life, and payload capability. However, while [138] defines a "virtual" framework for the collaboration and usage of flying and walking locomotory systems, two distinct physical systems are employed. In Cultural Heritage, some obstacles could be unsurmountable for walking robots (e.g., a fallen wall, or a mosaic). In these cases, both locomotion modes are required for a single system to move onto the target point. Even if tracks are often the preferred locomotion mode for rescue and exploration robots, the risk of damaging precious surfaces requires a legged system. Moreover, legs provide superior stability on rough and uneven terrain, when compared to wheeled or tracked designs. Thus, a legged design was chosen for the walking mode, while a quadcopter architecture allowed HeritageBot to fly. Further details can be found in [139,140,141,142]. Examples of HeritageBot operation are shown in Figure 9 and Figure 10, with the prototype climbing steps and flying, respectively.
While flying, HeritageBot can easily overcome most of the obstacles and aerial mapping of the target Cultural Heritage area is possible. However, flight is characterized by a short battery life, and to optimize power consumption, walking is performed as the main mode of locomotion. Furthermore, the quadruped stance allows for stable image acquisition. Since the two locomotory systems are independent, hybrid motion strategies can be defined for HeritageBot as follows:
-
Optimal navigation: instead of planning HeritageBot path from one waypoint to the following one by considering a single locomotion mode, an energy cost function can be defined to take into account the energy consumption of the path by using: flight only; walking only; a combination of the two. Thus, an optimal path can be defined as the one with the minimal energy cost. Even if walking has a lower cost overall, an aerial path can be more convenient (or even the only possible way) in case of large obstacles on the way.
-
Dynamic balancing: the helices can be used to generate aerodynamic lift to balance the quadruped robot in case of slipping or similar losses of balance (e.g., landslides on the ground where the robot is walking). Moreover, an aerodynamic drag force can be generated to help the robot "walk" on surfaces with high inclination by keeping the feet contacting the ground.
-
Improved payload: in case of intervention and sample collection, an aerodynamic lift can be used to increase the payload of the system without overloading the linear actuators of the legs.
These three examples show that hybrid robots with independent locomotory systems can be used not only to perform the same tasks of traditional mobile robots, but that the collaboration between multiple locomotion modes could push the capabilities of the robot over some of the traditional limits.
6. Discussion
Research on mobile robots spanned over 60 years, whereas hybrid designs with two locomotion modes stretch over the last two decades only, or the last one without considering wheeled/legged robots. A single example [136] that can navigate through more than two environments has been identified. Two distinct design trends emerge from the literature on hybrid robots:
-
Main and secondary modes of locomotion: one of the main design trends behind hybrid mobile robot is to have a primary mode of locomotion that is usually more efficient or performing, and a secondary mode that is used only to overcome obstacles. An example of this design is given by wheeled/legged mobile robots.
-
Reconfigurable mode of locomotion: many hybrid robots use a single mode of locomotion (e.g., legs, or helices) that works in more than one environment with minimal change. For examples, helices can be used to generate thrust in water, and lift for flying, or legs can swim and walk.
The main research gaps and issues in hybrid mobile robots can be identified as:
-
Independent locomotion modes: robots with two or more independent locomotory systems are usually either designed to use them one at a time. Little research has been done on how multiple modes can interact and collaborate.
-
Applications: while the most common designs are usually task-oriented, many bio-inspired robots are developed without a target application, but only to prove the feasibility of new designs (e.g., most of the flapping wings robot). Even if those robots are interesting, the lack of focus limits them to low TRLs.
-
Performance index: a general index to represent the performance of the robot, as for example energy consumption and efficiency during different motion modes, is not available. Thus, it is difficult to compare robots with different modes of motion even when they move in similar environments.
Overall, the mechanical design of traditional mobile robots is secondary to the development of their control and navigation system, since the technology in mechatronics is more mature than the current AI and navigation systems. However, the fast development and widespread availability of new control and navigation technologies in the 2000s and 2010s is leading to a point where the mechanical design of hybrid robots becomes the limiting factor to commercial success or widespread availability. Even nowadays, research on multimodal robots is focused on the mechanical system itself and on low-level control rather than high-level control and navigation, especially in the case of reconfigurable robots.
7. Conclusions
This paper summarized the current design solutions for mobile robots in any environment, with an emphasis on hybrid mobility combining capabilities for terrestrial, aerial, and aquatic locomotion. A survey was presented to discuss solutions and characteristics of mobile robots, in order to introduce hybrid designs that integrate different technologies for different environments. The HeritageBot Platform was presented as a case study from the direct experiences of the authors to show the successful integration of mobile modules into a robot with hybrid synergic capabilities.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Siciliano, B.; Khatib, O. (Eds.) Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Gage, D.W. UGV history 101: A brief history of Unmanned Ground Vehicle (UGV) development efforts. Ummanned Syst. Mag. 1995, 13, 1–9. [Google Scholar]
- Nilsson, N.J. A Mobile Automaton: An Application of Artificial Intelligence Techniques; SRI International: Menlo Park, CA, USA, 1969. [Google Scholar]
- Nilsson, N.J. Shakey the Robot; SRI International: Menlo Park, CA, USA, 1984. [Google Scholar]
- Frank, A.A. Automatic Control Systems for Legged Locomotion; USCEE Report No. 273; University of Southern California: Los Angeles, CA, USA, 1968. [Google Scholar]
- Liston, R.A.; Mosher, R.S. A versatile walking truck. In Proceedings of the Transportation Engineering Conference; ASME-NYAS: Washington, DC, USA, 1968. [Google Scholar]
- Kato, I.; Tsuiki, H. The hydraulically powered biped walking machine with a high carrying capacity. In IV Symposium on External Control of Human Extremities; Yugoslav Committee for Electronics and Automation: Dubrovnik, Croatia, 1972. [Google Scholar]
- Keane, J.F.; Carr, S.S. A brief history of early unmanned aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. [Google Scholar]
- Yuh, J. Design and control of autonomous underwater robots: A survey. Auto. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Antonelli, G. Underwater Robots; Springer International Publishing: Cham, Switzerland, 2014; Volume 3. [Google Scholar]
- Nussbaum, M.C. Aristotle's De Motu Animalium: Text with Translation, Commentary, and Interpretive Essays; Princeton University Press: Princeton, NJ, USA, 1985. [Google Scholar]
- Taylor, G.; Triantafyllou, M.S.; Tropea, C. (Eds.) Animal Locomotion; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Gordon, M.S.; Blickhan, R.; Dabiri, J.O.; Videler, J.J. Animal Locomotion: Physical Principles and Adaptations; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Biewener, A.; Patek, S. Animal Locomotion; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Yuh, J.; West, M. Underwater robotics. Adv. Robot. 2001, 15, 609–639. [Google Scholar] [CrossRef]
- Antonelli, G.; Fossen, T.I.; Yoerger, D.R. Underwater Robotics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 987–1008. [Google Scholar]
- Moore, S.W.; Bohm, H.; Jensen, V.; Johnston, N. Underwater Robotics: Science, Design & Fabrication; Marine Advanced Technology Education (MATE) Center: Monterey, CA, USA, 2010. [Google Scholar]
- Hubbard, J.J.; Fleming, M.; Palmre, V.; Pugal, D.; Kim, K.J.; Leang, K.K. Monolithic IPMC fins for propulsion and maneuvering in bioinspired underwater robotics. IEEE J. Ocean. Eng. 2013, 39, 540–551. [Google Scholar] [CrossRef]
- Behkam, B.; Sitti, M. Design methodology for biomimetic propulsion of miniature swimming robots. J. Dyn. Syst. Meas. Control. 2006, 128, 36–43. [Google Scholar] [CrossRef]
- Behkam, B.; Sitti, M. Modeling and testing of a biomimetic flagellar propulsion method for microscale biomedical swimming robots. In Proceedings of the IEEE Advanced Intelligent Mechanotronics Conference, Monterey, CA, USA, 24–28 July 2005; pp. 24–28. [Google Scholar]
- Long, J.H.; Koob, T.J.; Irving, K.; Combie, K.; Engel, V.; Livingston, N.; Schumacher, J. Biomimetic evolutionary analysis: Testing the adaptive value of vertebrate tail stiffness in autonomous swimming robots. J. Exp. Biol. 2006, 209, 4732–4746. [Google Scholar] [CrossRef]
- Ye, Z.; Régnier, S.; Sitti, M. Rotating magnetic miniature swimming robots with multiple flexible flagella. IEEE Trans. Robot. 2013, 30, 3–13. [Google Scholar]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4975–4980. [Google Scholar]
- Chu, W.S.; Lee, K.T.; Song, S.H.; Han, M.W.; Lee, J.Y.; Kim, H.S.; Ahn, S.H. Review of biomimetic underwater robots using smart actuators. Int. J. Precis. Eng. Manuf. 2012, 13, 1281–1292. [Google Scholar] [CrossRef]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Innovation in underwater robots: Biologically inspired swimming snake robots. IEEE Robot. Autom. Mag. 2016, 23, 44–62. [Google Scholar] [CrossRef]
- Yoerger, D.R.; Bradley, A.M.; Walden, B.B.; Cormier, M.H.; Ryan, W.B. Fine-scale seafloor survey in rugged deep-ocean terrain with an autonomous robot. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2020; Volume 2, pp. 1787–1792. [Google Scholar]
- Whitcomb, L.; Yoerger, D.R.; Singh, H.; Howland, J. Advances in underwater robot vehicles for deep ocean exploration: Navigation, control, and survey operations. In Robotics Research; Springer: London, UK, 2000; pp. 439–448. [Google Scholar]
- Das, J.; Sukhatme, G.S. A robotic sentinel for benthic sampling along a transect. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 206–213. [Google Scholar]
- Hu, D.L.; Chan, B.; Bush, J.W. The hydrodynamics of water strider locomotion. Nature 2003, 424, 663. [Google Scholar] [CrossRef] [PubMed]
- Ozcan, O.; Wang, H.; Taylor, J.D.; Sitti, M. STRIDE II: a water strider-inspired miniature robot with circular footpads. Int. J. Adv. Rob. Syst. 2014, 11, 85. [Google Scholar] [CrossRef]
- Platzer, M.F.; Jones, K.D.; Young, J.; SLai, J.C. Flapping wing aerodynamics: Progress and challenges. AIAA J. 2008, 46, 2136–2149. [Google Scholar] [CrossRef]
- Couceiro, M.S.; Ferreira, N.F.; Machado, J.T. Application of fractional algorithms in the control of a robotic bird. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 895–910. [Google Scholar] [CrossRef]
- Zdunich, P.; Bilyk, D.; MacMaster, M.; Loewen, D.; DeLaurier, J.; Kornbluh, R.; Holeman, D. Development and testing of the mentor flapping-wing micro air vehicle. J. Aircr. 2007, 44, 1701–1711. [Google Scholar] [CrossRef]
- Karasek, M. Robotic Hummingbird: Design of a Control Mechanism for A Hovering Flapping Wing Micro Air Vehicle; Universite libre de Bruxelles: Bruxelles, Belgium, 2014. [Google Scholar]
- Gerdes, J.; Holness, A.; Perez-Rosado, A.; Roberts, L.; Greisinger, A.; Barnett, E.; Gupta, S.K. Robo Raven: A flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robot. 2014, 1, 275–288. [Google Scholar] [CrossRef]
- Perez-Rosado, A.; Gehlhar, R.D.; Nolen, S.; Gupta, S.K.; Bruck, H.A. Design, fabrication, and characterization of multifunctional wings to harvest solar energy in flapping wing air vehicles. Smart Mater. Struct. 2015, 24, 065042. [Google Scholar] [CrossRef]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 588. [Google Scholar]
- Bahlman, J.W.; Swartz, S.M.; Breuer, K.S. Design and characterization of a multi-articulated robotic bat wing. Bioinspiration Biomim. 2013, 8, 016009. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.Y.; Wood, R.J. A review of actuation and power electronics options for flapping-wing robotic insects. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 779–786. [Google Scholar]
- Yan, J.; Wood, R.J.; Avadhanula, S.; Sitti, M.; Fearing, R.S. Towards flapping wing control for a micromechanical flying insect. In Proceedings of the Proceedings 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Korea, 21–26 May 2001; Volume 4, pp. 3901–3908. [Google Scholar]
- Deng, X.; Schenato, L.; Wu, W.C.; Sastry, S.S. Flapping flight for biomimetic robotic insects: Part I-system modeling. IEEE Trans. Robot. 2006, 22, 776–788. [Google Scholar] [CrossRef]
- Deng, X.; Schenato, L.; Sastry, S.S. Flapping flight for biomimetic robotic insects: Part II-flight control design. IEEE Trans. Robot. 2006, 22, 789–803. [Google Scholar] [CrossRef]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled flight of a biologically inspired, insect-scale robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef]
- Baek, S.S.; Ma, K.Y.; Fearing, R.S. Efficient resonant drive of flapping-wing robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2854–2860. [Google Scholar]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Cai, G.; Dias, J.; Seneviratne, L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Demir, K.A.; Cicibas, H.; Arica, N. Unmanned aerial vehicle domain: Areas of research. Def. Sci. J. 2015, 65, 319–329. [Google Scholar] [CrossRef]
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460. [Google Scholar] [CrossRef] [PubMed]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Bamburry, D. Drones: Designed for product delivery. Des. Manag. Rev. 2015, 26, 40–48. [Google Scholar]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Scott, J.; Scott, C. Drone delivery models for healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Waikoloa, HI, USA, 4–7 January 2017. [Google Scholar]
- Pankine, A.A.; Aaron, K.M.; Heun, M.K.; Nock, K.T.; Schlaifer, R.S.; Wyszkowski, C.J.; Lorenz, R.D. Directed aerial robot explorers for planetary exploration. Adv. Space Res. 2004, 33, 1825–1830. [Google Scholar] [CrossRef]
- Csonka, P.J.; Waldron, K.J. A brief history of legged robotics. In Technology Developments: The Role of Mechanism and Machine Science and IFToMM; Springer: Dordrecht, The Netherlands, 2011; pp. 59–73. [Google Scholar]
- Lim, H.O.; Takanishi, A. Biped walking robots created at Waseda University: WL and WABIAN family. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 49–64. [Google Scholar] [CrossRef]
- Raibert, M.H. Legged Robots that Balance; MIT Press: Cambridge, UK, 1986. [Google Scholar]
- Hirose, M.; Ogawa, K. Honda humanoid robots development. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2006, 365, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Boston Dynamics. 2019. Available online: https://www.bostondynamics.com/ (accessed on 10 June 2019).
- Kulk, J.; Welsh, J. A low power walk for the NAO robot. In Proceedings of the 2008 Australasian Conference on Robotics & Automation (ACRA-2008), ARAA, Canberra, ACT, Australia, 3–5 December 2008; Kim, J., Mahony, R., Eds.; pp. 1–7. [Google Scholar]
- Metta, G.; Natale, L.; Nori, F.; Sandini, G.; Vernon, D.; Fadiga, L.; Bernardino, A. The iCub humanoid robot: An open-systems platform for research in cognitive development. Neural Netw. 2010, 23, 1125–1134. [Google Scholar] [CrossRef] [PubMed]
- Tsagarakis, N.G.; Caldwell, D.G.; Negrello, F.; Choi, W.; Baccelliere, L.; Loc, V.G.; Natale, L. WALK-MAN: A High-Performance Humanoid Platform for Realistic Environments. J. Field Robot. 2017, 34, 1225–1259. [Google Scholar] [CrossRef]
- Jung, H.W.; Seo, Y.H.; Ryoo, M.S.; Yang, H.S. Affective communication system with multimodality for a humanoid robot, AMI. In Proceedings of the 2004 4th IEEE/RAS International Conference on Humanoid Robots, Santa Monica, CA, USA, 10–12 November 2004; Volume 2, pp. 690–706. [Google Scholar]
- Tellez, R.; Ferro, F.; Garcia, S.; Gomez, E.; Jorge, E.; Mora, D.; Faconti, D. Reem-B: An autonomous lightweight human-size humanoid robot. In Proceedings of the Humanoids 2008—8th IEEE-RAS International Conference on Humanoid Robots, Daejeon, Korea, 1–3 December 2008; pp. 462–468. [Google Scholar]
- Russo, M.; Cafolla, D.; Ceccarelli, M. Design and Experiments of a Novel Humanoid Robot with Parallel Architectures. Robotics 2018, 7, 79. [Google Scholar] [CrossRef]
- Asfour, T.; Regenstein, K.; Azad, P.; Schroder, J.; Bierbaum, A.; Vahrenkamp, N.; Dillmann, R. ARMAR-III: An integrated humanoid platform for sensory-motor control. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 169–175. [Google Scholar]
- Asfour, T.; Schill, J.; Peters, H.; Klas, C.; Bücker, J.; Sander, C.; Bartenbach, V. Armar-4: A 63 dof torque controlled humanoid robot. In Proceedings of the 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 390–396. [Google Scholar]
- Campion, G.; Chung, W. Wheeled robots. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 391–410. [Google Scholar]
- Muir, P.F.; Neuman, C.P. Kinematic modeling of wheeled mobile robots. J. Robot. Syst. 1987, 4, 281–340. [Google Scholar] [CrossRef]
- Campion, G.; Bastin, G.; D'Andrea-Novel, B. Structural properties and classification of kinematic and dynamic models of wheeled mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 462–469. [Google Scholar]
- Dixon, W.E.; Dawson, D.M.; Zergeroglu, E.; Behal, A. Nonlinear Control of Wheeled Mobile Robots; Springer: London, UK, 2001; Volume 175. [Google Scholar]
- Chan, R.P.M.; Stol, K.A.; Halkyard, C.R. Review of modelling and control of two-wheeled robots. Annu. Rev. Control 2013, 37, 89–103. [Google Scholar] [CrossRef]
- Ortigoza, R.S.; Marcelino-Aranda, M.; Ortigoza, G.S.; Guzman, V.M.H.; Molina-Vilchis, M.A.; Saldana-Gonzalez, G.; Olguin-Carbajal, M. Wheeled mobile robots: A review. IEEE Lat. Am. Trans. 2012, 10, 2209–2217. [Google Scholar] [CrossRef]
- Chen, S.Y.; Chen, W.J. Review of tracked mobile robots. Mech. Electr. Eng. Mag. 2007, 12. [Google Scholar]
- Karavaev, Y.L.; Kilin, A.A. The dynamics and control of a spherical robot with an internal omniwheel platform. Regul. Chaotic Dyn. 2015, 20, 134–152. [Google Scholar] [CrossRef]
- Watanabe, K. Control of an omnidirectional mobile robot. In Proceedings of the 1998 Second International Conference. Knowledge-Based Intelligent Electronic Systems. Proceedings KES'98 (Cat. No. 98EX111), Adelaide, Australia, 21–23 April 1998; Volume 1, pp. 51–60. [Google Scholar]
- Ashmore, M.; Barnes, N. Omni-drive robot motion on curved paths: The fastest path between two points is not a straight-line. In Proceedings of the Australian Joint Conference on Artificial Intelligence, Canberra, ACT, Australia, 2–6 December 2002; Springer: Berlin/Heidelberg, Germany, 2002; pp. 225–236. [Google Scholar]
- Salih, J.E.M.; Rizon, M.; Yaacob, S.; Adom, A.H.; Mamat, M.R. Designing omni-directional mobile robot with mecanum wheel. Am. J. Appl. Sci. 2006, 3, 1831–1835. [Google Scholar]
- Armour, R.H.; Vincent, J.F. Rolling in nature and robotics: A review. J. Bionic Eng. 2006, 3, 195–208. [Google Scholar] [CrossRef]
- Chase, R.; Pandya, A. A review of active mechanical driving principles of spherical robots. Robotics 2012, 1, 3–23. [Google Scholar] [CrossRef]
- Hirose, S.; Yamada, H. Snake-like robots. IEEE Robot. Autom. Mag. 2009, 16, 88–98. [Google Scholar] [CrossRef]
- Hirose, S.; Morishima, A.; Tukagosi, S.; Tsumaki, T.; Monobe, H. Design of practical snake vehicle: Articulated body mobile robot KR-II. In Proceedings of the Fifth International Conference on Advanced Robotics' Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; pp. 833–838. [Google Scholar]
- Mori, M.; Hirose, S. Development of active cord mechanism ACM-R3 with agile 3D mobility. In Proceedings of the Proceedings 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 3, pp. 1552–1557. [Google Scholar]
- Hirose, S.; Fukushima, E.F. Snakes and strings: New robotic components for rescue operations. Int. J. Robot. Res. 2004, 23, 341–349. [Google Scholar] [CrossRef]
- Hirose, S.; Mori, M. Biologically inspired snake-like robots. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; pp. 1–7. [Google Scholar]
- Burdick, J.W.; Radford, J.; Chirikjian, G.S. A 'sidewinding' locomotion gait for hyper-redundant robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 101–106. [Google Scholar]
- Chirikjian, G.S.; Burdick, J.W. A modal approach to hyper-redundant manipulator kinematics. IEEE Trans. Robot. Autom. 1994, 10, 343–354. [Google Scholar] [CrossRef]
- Chirikjian, G.S.; Burdick, J.W. The kinematics of hyper-redundant robot locomotion. IEEE Trans. Robot. Autom. 1995, 11, 781–793. [Google Scholar] [CrossRef]
- Jones, B.A.; Walker, I.D. Practical kinematics for real-time implementation of continuum robots. IEEE Trans. Robot. 2006, 22, 1087–1099. [Google Scholar] [CrossRef]
- Jones, B.A.; Walker, I.D. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Camarillo, D.B.; Milne, C.F.; Carlson, C.R.; Zinn, M.R.; Salisbury, J.K. Mechanics modeling of tendon-driven continuum manipulators. IEEE Trans. Robot. 2008, 24, 1262–1273. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Walker, I.D. Continuous backbone "continuum" robot manipulators. ISRN Robot. 2013, 2013, 1–19. [Google Scholar] [CrossRef]
- Hatton, R.L.; Choset, H. Generating gaits for snake robots: Annealed chain fitting and keyframe wave extraction. Auton. Robot. 2010, 28, 271–281. [Google Scholar] [CrossRef]
- Hatton, R.L.; Knepper, R.A.; Choset, H.; Rollinson, D.; Gong, C.; Galceran, E. Snakes on a plan: Toward combining planning and control. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5174–5181. [Google Scholar]
- Penning, R.S.; Jung, J.; Borgstadt, J.A.; Ferrier, N.J.; Zinn, M.R. Towards closed loop control of a continuum robotic manipulator for medical applications. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4822–4827. [Google Scholar]
- Butler, E.J.; Hammond-Oakley, R.; Chawarski, S.; Gosline, A.H.; Codd, P.; Anor, T.; Lock, J. Robotic neuro-endoscope with concentric tube augmentation. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2941–2946. [Google Scholar]
- Ho, M.; Kim, Y.; Cheng, S.S.; Gullapalli, R.; Desai, J.P. Design, development, and evaluation of an MRI-guided SMA spring-actuated neurosurgical robot. Int. J. Robot. Res. 2015, 34, 1147–1163. [Google Scholar] [CrossRef] [PubMed]
- Qi, F.; Ju, F.; Bai, D.; Wang, Y.; Chen, B. Motion modelling and error compensation of a cable-driven continuum robot for applications to minimally invasive surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2018, 14, e1932. [Google Scholar] [CrossRef] [PubMed]
- Kamegawa, T.; Yarnasaki, T.; Igarashi, H.; Matsuno, F. Development of the snake-like rescue robot "kohga". In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA' 04 2004, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 5081–5086. [Google Scholar]
- Granosik, G.; Hansen, M.G.; Borenstein, J. The OmniTread serpentine robot for industrial inspection and surveillance. Ind. Robot Int. J. 2005, 32, 139–148. [Google Scholar] [CrossRef]
- Li, Z.; Du, R. Design and analysis of a bio-inspired wire-driven multi-section flexible robot. Int. J. Adv. Robot. Syst. 2013, 10, 209. [Google Scholar] [CrossRef]
- Delimont, I.L.; Magleby, S.P.; Howell, L.L. Evaluating compliant hinge geometries for origami-inspired mechanisms. J. Mech. Robot. 2015, 7, 011009. [Google Scholar] [CrossRef]
- Zhang, K.; Qiu, C.; Dai, J.S. An extensible continuum robot with integrated origami parallel modules. J. Mech. Robot. 2016, 8, 031010. [Google Scholar] [CrossRef]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3, eaar7555. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, eaan3028. [Google Scholar] [CrossRef]
- Héder, M. From NASA to EU: The evolution of the TRL scale in Public Sector Innovation. Innov. J. 2017, 22, 1–23. [Google Scholar]
- Smith, J.A.; Sharf, I.; Trentini, M. Bounding gait in a hybrid wheeled-leg robot. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5750–5755. [Google Scholar]
- Grand, C.; Benamar, F.; Plumet, F.; Bidaud, P. Stability and traction optimization of a reconfigurable wheel-legged robot. Int. J. Robot. Res. 2004, 23, 1041–1058. [Google Scholar] [CrossRef]
- Smith, J.A.; Sharf, I.; Trentini, M. PAW: A hybrid wheeled-leg robot. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15-19 May 2006; pp. 4043–4048. [Google Scholar]
- Adachi, H.; Koyachi, N.; Arai, T.; Shimiza, A.; Nogami, Y. Mechanism and control of a leg-wheel hybrid mobile robot. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), Kyongju, Korea, 17–21 October 1999; Volume 3, pp. 1792–1797. [Google Scholar]
- Grand, C.; BenAmar, F.; Plumet, F.; Bidaud, P. Decoupled control of posture and trajectory of the hybrid wheel-legged robot Hylos. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA'04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 5111–5116. [Google Scholar]
- Kim, Y.S.; Jung, G.P.; Kim, H.; Cho, K.J.; Chu, C.N. Wheel transformer: A wheel-leg hybrid robot with passive transformable wheels. IEEE Trans. Robot. 2014, 30, 1487–1498. [Google Scholar] [CrossRef]
- Chen, S.C.; Huang, K.J.; Chen, W.H.; Shen, S.Y.; Li, C.H.; Lin, P.C. Quattroped: A leg—Wheel transformable robot. IEEE/ASME Trans. Mechatron. 2013, 19, 730–742. [Google Scholar] [CrossRef]
- Tadakuma, K.; Tadakuma, R.; Maruyama, A.; Rohmer, E.; Nagatani, K.; Yoshida, K.; Kaneko, M. Mechanical design of the wheel-leg hybrid mobile robot to realize a large wheel diameter. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3358–3365. [Google Scholar]
- Michaud, F.; Letourneau, D.; Arsenault, M.; Bergeron, Y.; Cadrin, R.; Gagnon, F.; Lepage, P. Multi-modal locomotion robotic platform using leg-track-wheel articulations. Auton. Robot. 2005, 18, 137–156. [Google Scholar] [CrossRef]
- Michaud, F.; Létourneau, D.; Arsenault, M.; Bergeron, Y.; Cadrin, R.; Gagnon, F.; Lapage, P. AZIMUT, a leg-track-wheel robot. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2553–2558. [Google Scholar]
- MorphEx. Available online: http://zentasrobots.com/robot-projects/morphex-mkii/ (accessed on 10 June 2019).
- Thakker, R.; Kamat, A.; Bharambe, S.; Chiddarwar, S.; Bhurchandi, K.M. Rebis-reconfigurable bipedal snake robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 309–314. [Google Scholar]
- Singh, A.; Paigwar, A.; Manchukanti, S.T.; Saroya, M.; Maurya, M.; Chiddarwar, S. Design and implementation of Omni-directional spherical modular snake robot (OSMOS). In Proceedings of the 2017 IEEE International Conference on Mechatronics (ICM), Churchill, Australia, 13–15 February 2017; pp. 79–84. [Google Scholar]
- Yu, S.; Ma, S.; Li, B.; Wang, Y. An amphibious snake-like robot with terrestrial and aquatic gaits. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2960–2961. [Google Scholar]
- Dudek, G.; Giguere, P.; Prahacs, C.; Saunderson, S.; Sattar, J.; Torres-Mendez, L.A.; Zacher, J. Aqua: An amphibious autonomous robot. Computer 2007, 40, 46–53. [Google Scholar] [CrossRef]
- Chen, Y.; Doshi, N.; Goldberg, B.; Wang, H.; Wood, R.J. Controllable water surface to underwater transition through electrowetting in a hybrid terrestrial-aquatic microrobot. Nat. Commun. 2018, 9, 2495. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, S. A versatile locomotion mechanism for amphibious robots: Eccentric paddle mechanism. Adv. Robot. 2013, 27, 611–625. [Google Scholar] [CrossRef]
- Liang, X.; Xu, M.; Xu, L.; Liu, P.; Ren, X.; Kong, Z.; Zhang, S. The AmphiHex: A novel amphibious robot with transformable leg-flipper composite propulsion mechanism. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 3667–3672. [Google Scholar]
- Yu, J.; Ding, R.; Yang, Q.; Tan, M.; Wang, W.; Zhang, J. On a bio-inspired amphibious robot capable of multimodal motion. IEEE/ASME Trans. Mechatron. 2011, 17, 847–856. [Google Scholar] [CrossRef]
- Crespi, A.; Badertscher, A.; Guignard, A.; Ijspeert, A.J. Swimming and crawling with an amphibious snake robot. In Proceedings of the 2005 IEEE international conference on robotics and automation, Barcelona, Spain, 18–22 April 2005; pp. 3024–3028. [Google Scholar]
- Li, M.; Guo, S.; Hirata, H.; Ishihara, H. A roller-skating/walking mode-based amphibious robot. Robot. Comput. Integr. Manuf. 2017, 44, 17–29. [Google Scholar] [CrossRef]
- Daler, L.; Mintchev, S.; Stefanini, C.; Floreano, D. A bioinspired multi-modal flying and walking robot. Bioinspiration Biomim. 2015, 10, 016005. [Google Scholar] [CrossRef] [PubMed]
- Daler, L.; Lecoeur, J.; Hählen, P.B.; Floreano, D. A flying robot with adaptive morphology for multi-modal locomotion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1361–1366. [Google Scholar]
- Mulgaonkar, Y.; Araki, B.; Koh, J.S.; Guerrero-Bonilla, L.; Aukes, D.M.; Makineni, A.; Kumar, V. The flying monkey: A mesoscale robot that can run, fly, and grasp. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4672–4679. [Google Scholar]
- Pratt, C.J.; Leang, K.K. Dynamic underactuated flying-walking (DUCK) robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3267–3274. [Google Scholar]
- Yu, Y.; Ding, X. On hybrid modeling and control of a multi-propeller multifunction aerial robot with flying-walking locomotion. Auton. Robot. 2015, 38, 225–242. [Google Scholar] [CrossRef]
- Lock, R.J.; Vaidyanathan, R.; Burgess, S.C.; Loveless, J. Development of a biologically inspired multi-modal wing model for aerial-aquatic robotic vehicles through empirical and numerical modelling of the common guillemot, Uria aalge. Bioinspiration Biomim. 2010, 5, 046001. [Google Scholar] [CrossRef] [PubMed]
- Drews, P.L.; Neto, A.A.; Campos, M.F. Hybrid unmanned aerial underwater vehicle: Modeling and simulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4637–4642. [Google Scholar]
- Guo, Z.; Zhu, Y.; Wang, M.; Li, T.; Zhao, H.; Xu, L.; Ceccarelli, M. System Design and Experimental Analysis of an All-environment Mobile Robot. In IFToMM World Congress on Mechanism and Machine Science; Springer: Cham, Switzerland, 2019; pp. 1969–1978. [Google Scholar]
- Ceccarelli, M.; Cafolla, D.; Carbone, G.; Russo, M.; Cigola, M.; Senatore, L.J.; Supino, S. HeritageBot service robot assisting in cultural heritage. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 440–445. [Google Scholar]
- Fankhauser, P.; Bloesch, M.; Krüsi, P.; Diethelm, R.; Wermelinger, M.; Schneider, T.; Siegwart, R. Collaborative navigation for flying and walking robots. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2859–2866. [Google Scholar]
- Ceccarelli, M.; Cafolla, D.; Russo, M.; Carbone, G. Design and construction of a demonstrative HeritageBot platform. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Torino, Italy, 21–23 June 2017; Springer: Cham, Switzerland, 2017; pp. 355–362. [Google Scholar]
- Ceccarelli, M.; Cafolla, D.; Russo, M.; Carbone, G. Prototype and testing of heritagebot platform for service in cultural heritage. In New Activities for Cultural Heritage; Springer: Cham, Switzerland, 2017; pp. 103–112. [Google Scholar]
- Ceccarelli, M.; Cafolla, D.; Russo, M.; Carbone, G. HeritageBot platform for service in Cultural Heritage frames. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418790692. [Google Scholar] [CrossRef]
- Cafolla, D.; Russo, M.; Ceccarelli, M. Experimental validation of HeritageBot III, a robotic platform for Cultural Heritage. J. Intell. Robot. Syst. 2020, 1–15. [Google Scholar] [CrossRef]
Figure 1. Hybrid locomotion modes (T – terrestrial, A – aerial, W – aquatic).
Figure 1. Hybrid locomotion modes (T – terrestrial, A – aerial, W – aquatic).
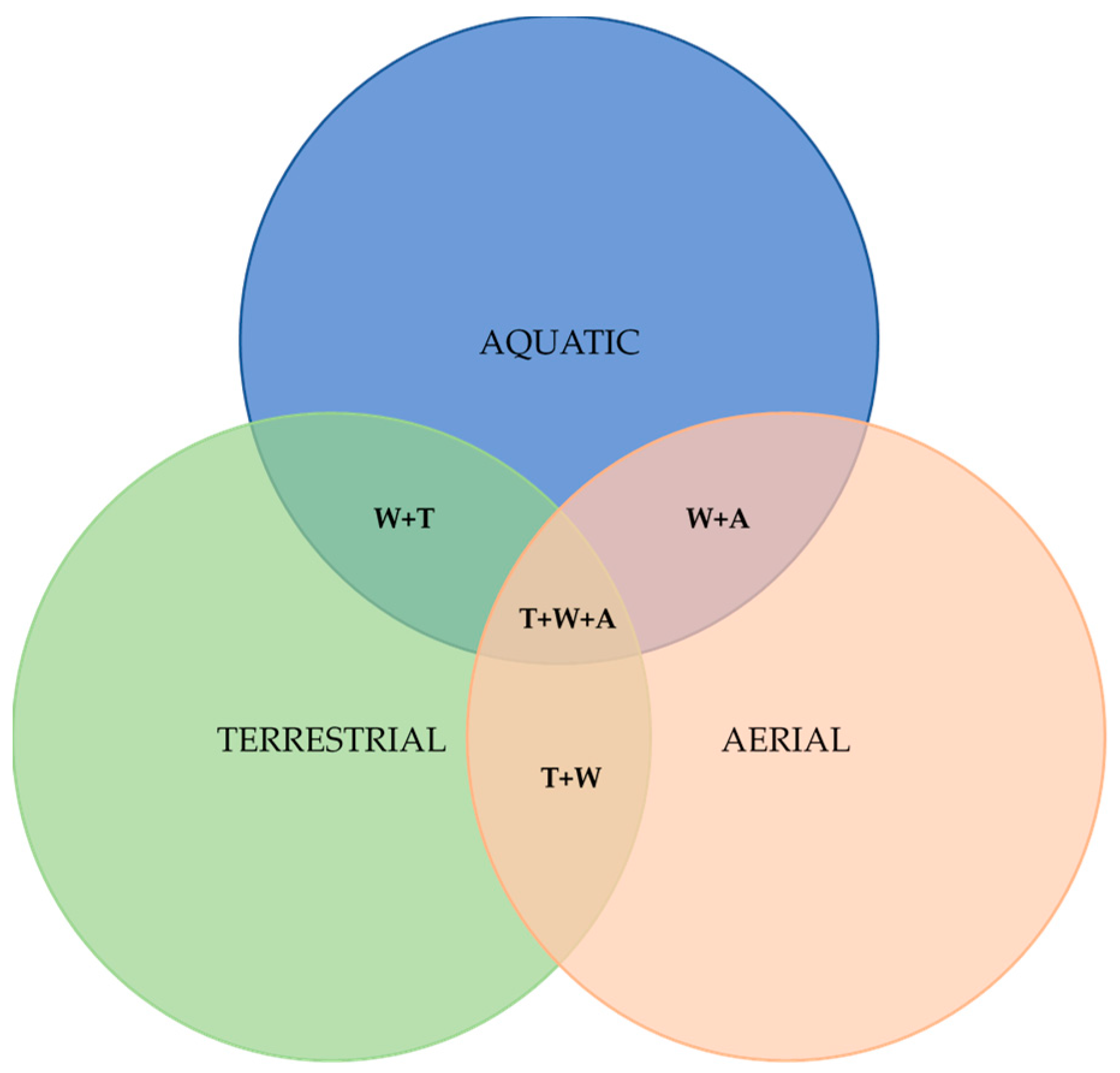
Figure 2. Terrestrial robots with independent wheels and legs: (a) a hybrid robot with bounding gait [108]; (b) top view of PAW [110]. Reproduced with permission 4822431205001 from J.A. Smith, IEEE Proceedings; published by IEEE, 2006; and with permission 4822431064892 from J.A. Smith, IEEE Proceedings; published by IEEE, 2006.
Figure 2. Terrestrial robots with independent wheels and legs: (a) a hybrid robot with bounding gait [108]; (b) top view of PAW [110]. Reproduced with permission 4822431205001 from J.A. Smith, IEEE Proceedings; published by IEEE, 2006; and with permission 4822431064892 from J.A. Smith, IEEE Proceedings; published by IEEE, 2006.
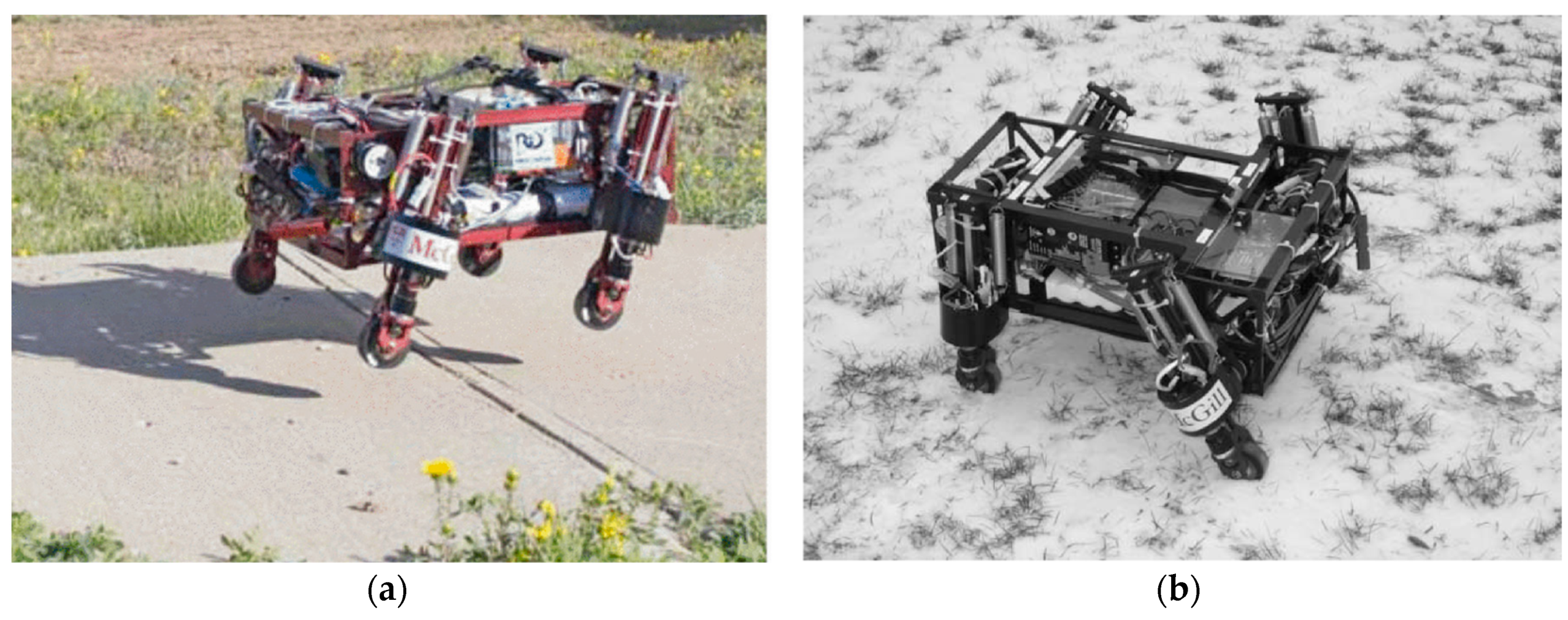
Figure 3. Terrestrial robots with transforming wheels and legs: (a) Quattroped (legged configuration) [114]; (b) Quattroped (wheeled configuration); (c) Wheel-leg hybrid robot (legged configuration) [115]; (d) Wheel-leg hybrid robot (wheeled configuration) [115]. Reproduced with permission 4822430789880 from Shen-Chiang Chen, IEEE/ASME Transactions on Mechatronics; published by IEEE, 2014; and with permission 4822440156230 from Kenjiro Tadakuma, IEEE Proceedings; published by IEEE, 2010.
Figure 3. Terrestrial robots with transforming wheels and legs: (a) Quattroped (legged configuration) [114]; (b) Quattroped (wheeled configuration); (c) Wheel-leg hybrid robot (legged configuration) [115]; (d) Wheel-leg hybrid robot (wheeled configuration) [115]. Reproduced with permission 4822430789880 from Shen-Chiang Chen, IEEE/ASME Transactions on Mechatronics; published by IEEE, 2014; and with permission 4822440156230 from Kenjiro Tadakuma, IEEE Proceedings; published by IEEE, 2010.
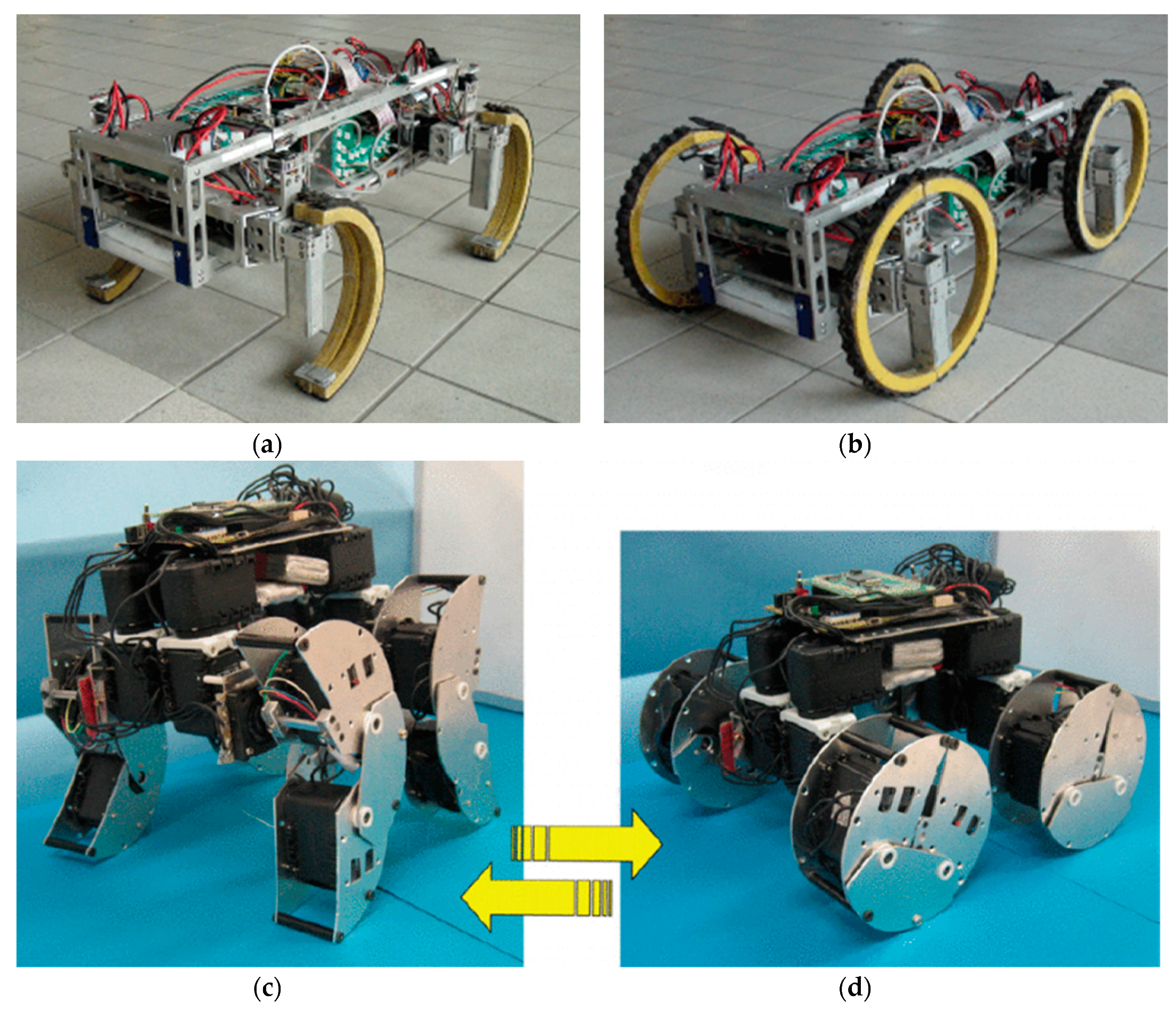
Figure 4. Terrestrial hybrid robots without wheels: (a) MorphEx, a transformational legged/rolling robot [118], (b) Rebis, a walking/snake-like robot [119]. Reproduced with permission 4822440256372 from Rohan Thakker, IEEE Proceedings; published by IEEE, 2014.
Figure 4. Terrestrial hybrid robots without wheels: (a) MorphEx, a transformational legged/rolling robot [118], (b) Rebis, a walking/snake-like robot [119]. Reproduced with permission 4822440256372 from Rohan Thakker, IEEE Proceedings; published by IEEE, 2014.
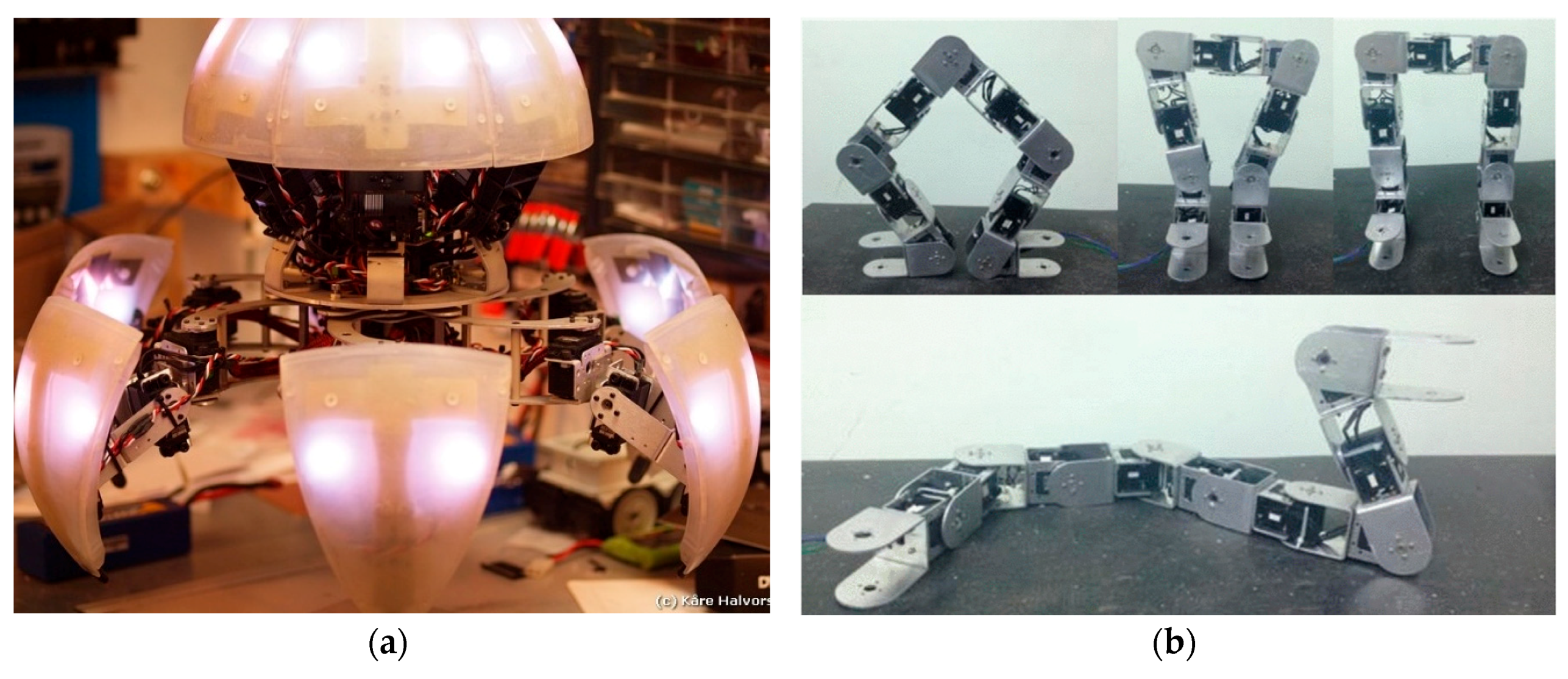
Figure 5. Amphibious hybrid robots: (a) Aqua [122], (b) Water surface microrobot [123]. Reproduced with permission 4822431455398 from Gregory Dudek, Computer Magazine; published by IEEE, 2007; and with permission under a Creative Commons Attribution 4.0 International License from Yufeng Chen, Neel Doshi, Benjamin Goldberg, Hongqiang Wang & Robert J. Wood, Nature Communication; published by Nature, 2018.
Figure 5. Amphibious hybrid robots: (a) Aqua [122], (b) Water surface microrobot [123]. Reproduced with permission 4822431455398 from Gregory Dudek, Computer Magazine; published by IEEE, 2007; and with permission under a Creative Commons Attribution 4.0 International License from Yufeng Chen, Neel Doshi, Benjamin Goldberg, Hongqiang Wang & Robert J. Wood, Nature Communication; published by Nature, 2018.
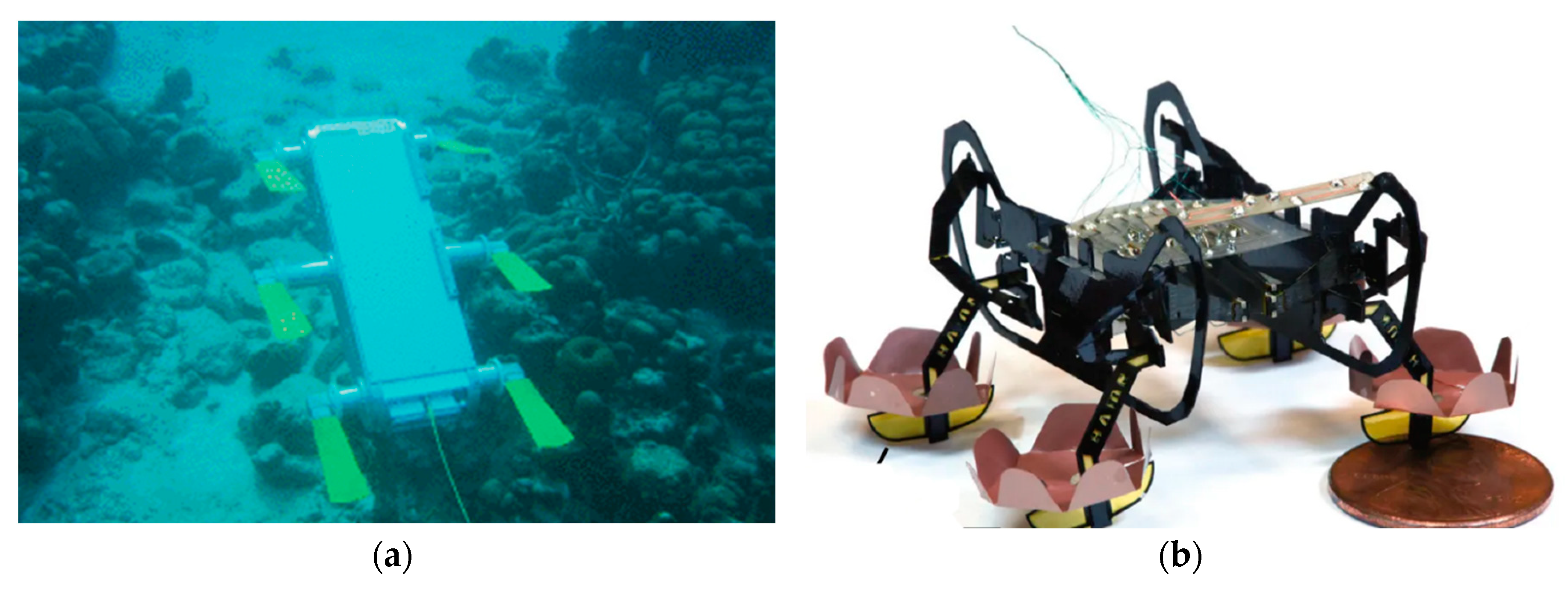
Figure 6. Swimming/crawling amphibious snake robot [127]. Reproduced with permission 4822431347404 from A. Crespi, IEEE Proceedings; published by IEEE, 2005.
Figure 6. Swimming/crawling amphibious snake robot [127]. Reproduced with permission 4822431347404 from A. Crespi, IEEE Proceedings; published by IEEE, 2005.
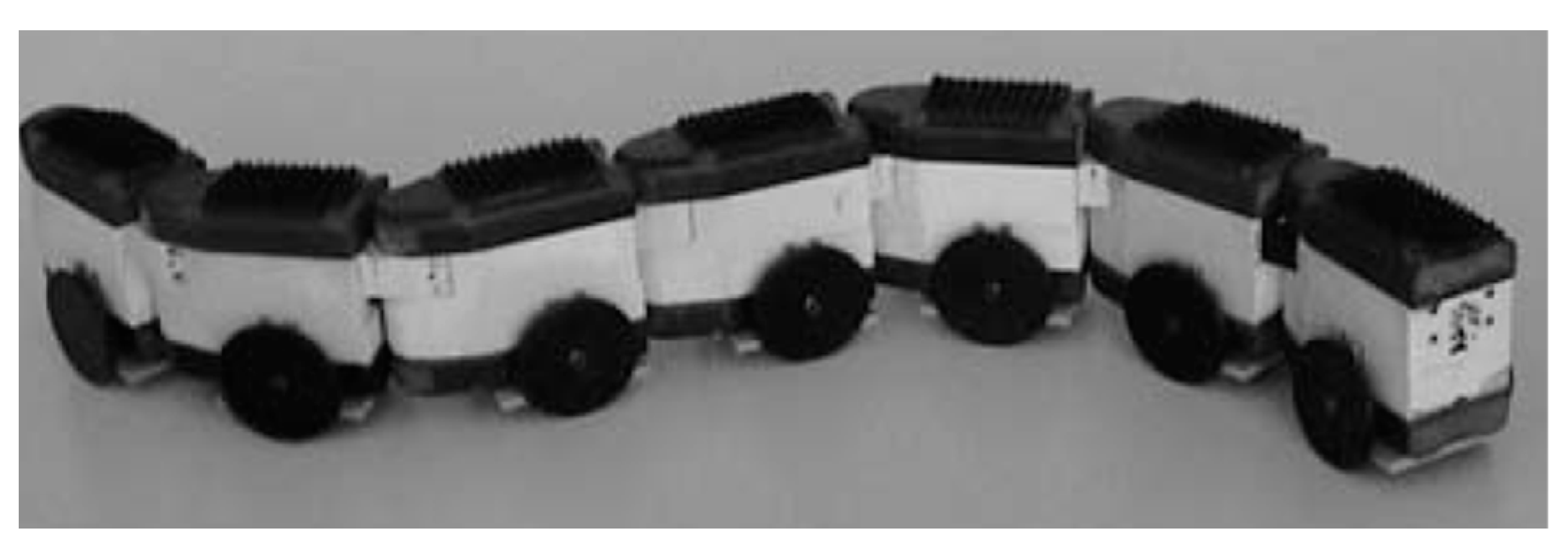
Figure 7. Flying/walking robots: "Flying monkey" [131]. Reproduced with permission 4822440040666 from Yash Mulgaonkar, IEEE Proceedings; published by IEEE, 2016.
Figure 7. Flying/walking robots: "Flying monkey" [131]. Reproduced with permission 4822440040666 from Yash Mulgaonkar, IEEE Proceedings; published by IEEE, 2016.

Figure 8. Hybrid design of the HeritageBot platform.
Figure 8. Hybrid design of the HeritageBot platform.

Figure 9. Step-climbing operation of the HeritageBot Prototype.
Figure 9. Step-climbing operation of the HeritageBot Prototype.

Figure 10. Flight operation of the HeritageBot Prototype with legs for all-terrain landing.
Figure 10. Flight operation of the HeritageBot Prototype with legs for all-terrain landing.

Table 1. Classification of mobile robots.
Table 1. Classification of mobile robots.
| AREAS | TYPES | MODES | TRL | CRI |
|---|---|---|---|---|
| AQUATIC | Swimming | Fins | 1–6 | - |
| Undulatory motion | 1–6 | - | ||
| Jet propulsion | 7–9 | - | ||
| Helices | 7–9 | 1–2 | ||
| Benthic | Legs | 1–3 | - | |
| Suction cups | 1–3 | - | ||
| Crawling | 1–3 | - | ||
| Rolling | 1–3 | - | ||
| Surface | Sails | 1–6 | - | |
| Fins | 1–6 | - | ||
| Helices | 1–6 | 1–2 | ||
| Jet propulsion | 1–6 | - | ||
| Surface striding | 1–3 | - | ||
| AERIAL | Active flying | Insect wings | 1–3 | - |
| Bird wings | 1–3 | - | ||
| Helices | 7–9 | 3–4 | ||
| Jet propulsion | 7–9 | 1–4 | ||
| Gliding | Gliding surfaces | 1–3 | - | |
| Ballooning | Balloons | 1–3 | - | |
| TERRESTRIAL | Walking/running/jumping | Legs | 4–9 | 1–2 |
| Sliding | Skates | 1–3 | - | |
| Crawling | Peristalsis | 1–4 | - | |
| Slithering | 1–4 | - | ||
| Climbing | Surface adhesion | 1–3 | - | |
| Brachiation | 1–3 | - | ||
| Rotation | Wheels | 7–9 | 3–4 | |
| Tracks | 7–9 | 3–4 | ||
| Rolling | 4–6 | 1–2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Hybrid Aerial and Aquatic Locomotion in an at-scale Robotic Insect
Source: https://www.mdpi.com/2218-6581/9/2/32/htm
0 Response to "Hybrid Aerial and Aquatic Locomotion in an at-scale Robotic Insect"
Post a Comment